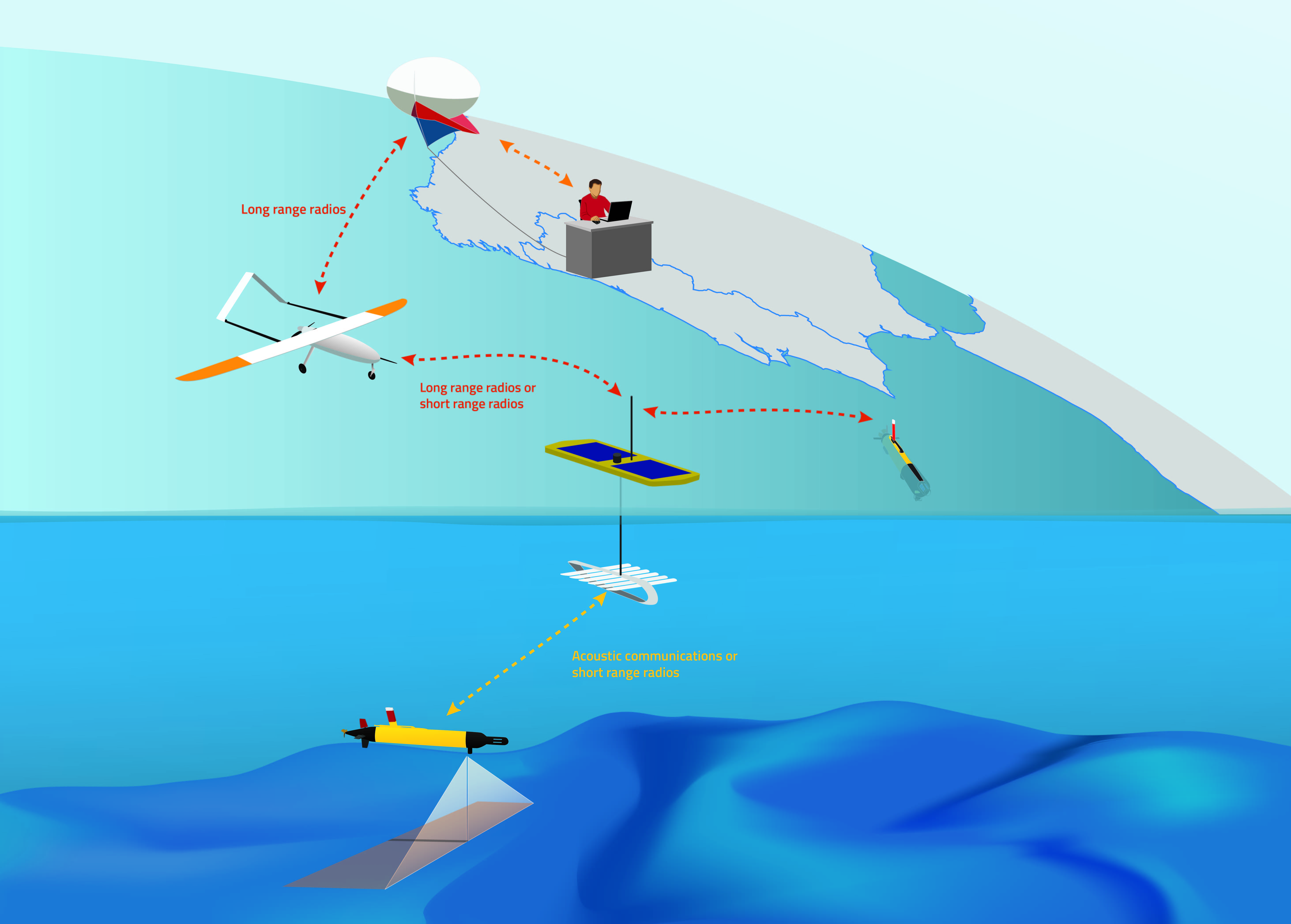
The project concerns the development and demonstration at sea of the Networked Ocean System, a networked vehicle system for persistent communications and data collection in remote oceanic areas.
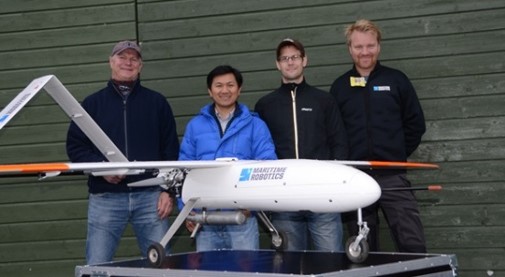
The system is composed of a long endurance autonomous surface vehicle (ASV), long endurance autonomous underwater vehicles (AUV), communication gateways, long range unmanned air vehicles (UAV), helikites, and control stations.
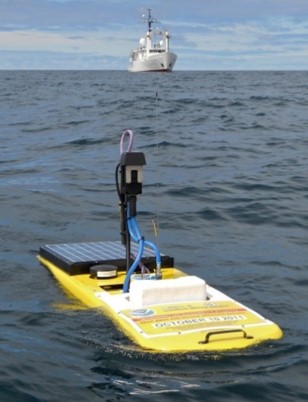
- The ASV is both a communications hotspot and a docking base (for AUVs), operating 24/7 in remote ocean areas.
- The ASV is wave powered and has solar panels for covering wide areas of the Atlantic.
- The ASV and the AUVs form a persistent, being available for long periods of time, and scalable data collection (environmental, maritime traffic, and wildlife) and communications network operating autonomously in remote oceanic areas.
- The ASV supports smart routing protocols for direct communications, via persistent UAV relays, or delayed data transfer, using UAVs or passing ships as data mules, to control stations, thus providing timely, secure and reliable communication services to control stations alternative to satellite based communications. This will increase overall efficiency and effectiveness.
- The communication gateways will be support opportunistic routing of data for ships used as data mules.
- The unmanned vehicles have on-board deliverable planning capabilities for unattended operations in remote locations to minimize intervention of human operators, which may not be available at all times.
- The UAVs use advanced radio technology for long range communications.
- The helikite[1], a hybrid between a balloon and a kite, will be used for mounting communications equipment for long range communications. These will be connected to the control stations.
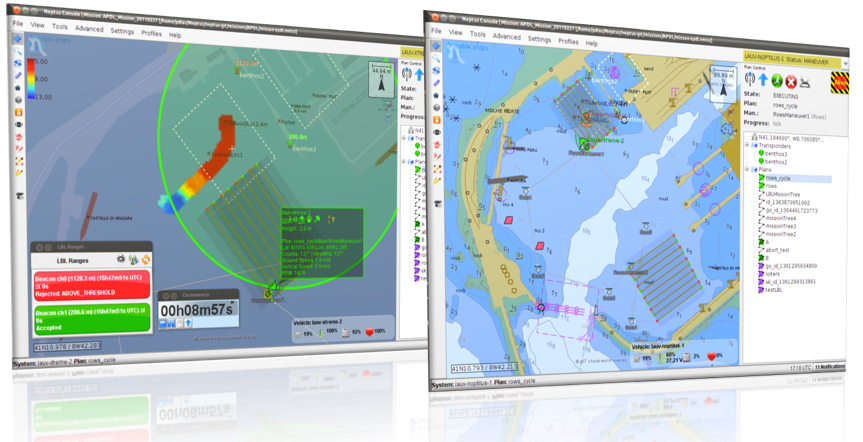
- The land, or ship-based, control stations provide advanced planning and execution control capabilities, as well as dissemination of data to service providers.
- The system supports inter-operability protocols to allow expansion to vehicles from third parties.
The overall Networked Ocean System is scalable. The system addresses all the topics of the call for this type of projects by providing unique and cost effective capabilities for covering wide areas in the Atlantic, being available for long periods of time, providing timely, secure and reliable communications, collecting data from smart platforms or land-based stations, and disseminating data to land-based stations or smart platforms.
[1] http://www.allsopp.co.uk/
 Long endurance autonomous underwater vehicles. These AUVs of the
Long endurance autonomous underwater vehicles. These AUVs of the